Phase 1
First phase of physical representation was with cardboard. However because of the imprecise nature of cardboard cut-outs and the gears' necessity for precision we decided to move on to relatively high fidelity prototypes quite early on.
 |
| The low-fidelity cardboard prototypes, held together at the joints by drinking straws. |
Phase 2
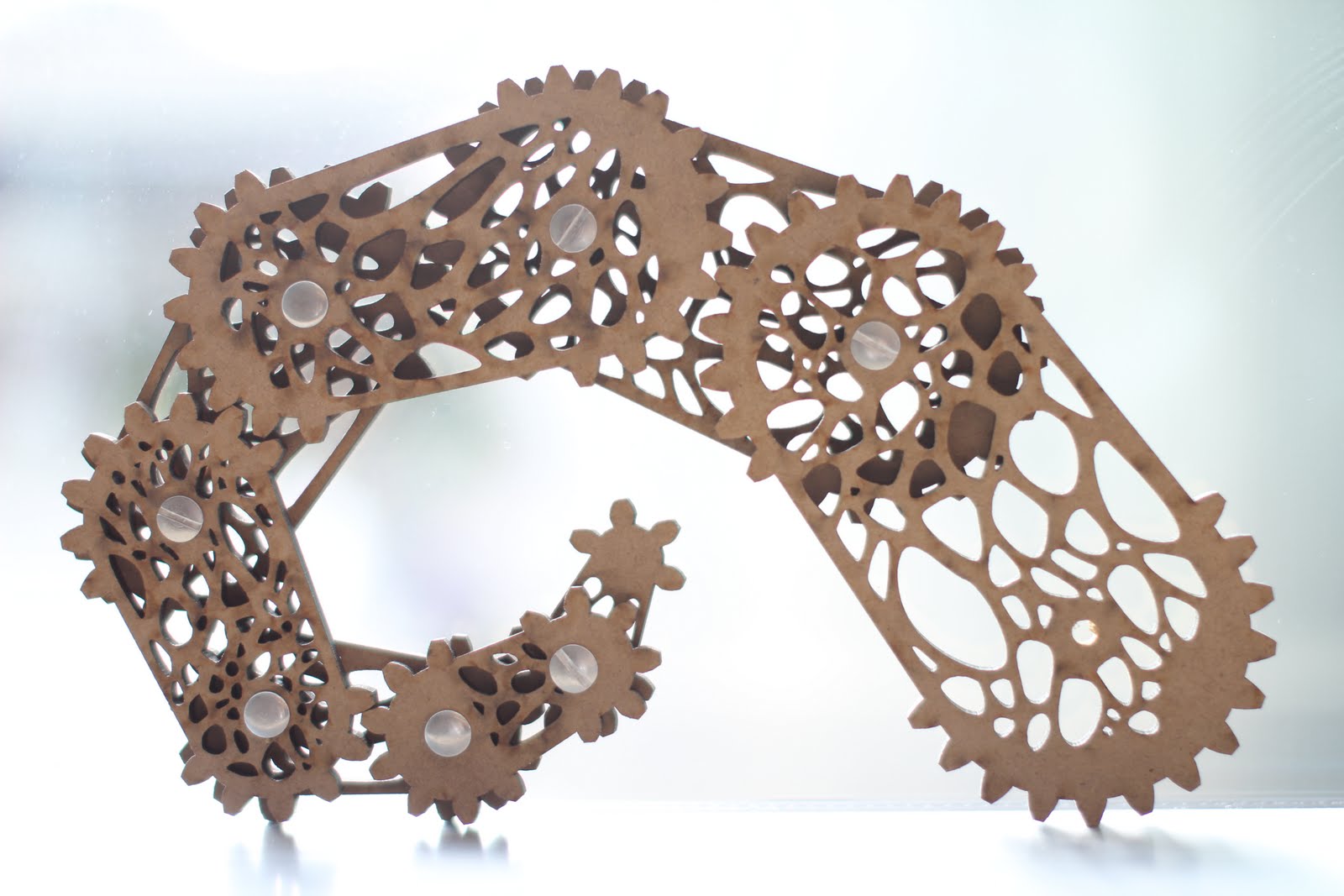
In the next phase of prototyping we laser cut MDF. This phase allowed us to concentrate on the relationship between the gears and the overall form and structure. In this phase we realized that the MDF, which is 1/4" thick, was quite heavy. We therefore decided to use very thin acrylic for the final form, as well as adding cut-outs to the pieces to make each as light as possible.
 |
| We decided not to laser cut the joint holes for this phase because we hadn't gotten the joint pieces yet. Instead we used a dremel to drill holes. |
 |
| The holes on each piece, along with the small tabs on either side of each piece, were added to allow us to experiment with string, wire, fabric, and other additional materials. |
 |
| The cut-out MDF arm. |
 |
We tried threading the arms with yarn. We did this for several reasons: we
wanted the disparities between the arms to be more apparent, and also we
wanted the waving motion to form a cohesive, connected wave form. |
 |
| Us testing out different movements with the yarn - ultimately problems of keeping it taut and continually accounting for slack led us to discard this part of the form. |
Phase 3
The final representation is composed of laser cut acrylic pieces that are 1/8".
 |
| The acrylic undergoing the laser cutting process. Having found appropriate joint fixtures, we then laser cut the joint holes. |
 |
| Poking out the laser cut cut-outs with a pen! |
 |
The finished laser cut arm pieces. We decided to add even more cut-outs to make the pieces even lighter.
We did this in the hopes of making it easier for the motor to control the arms. |
 |
| It is most entertaining to peel the blue cover off the laser-cut acrylic. |
Final Form
 |
| The final arm, attached to the base and motor. There are three of theses structures in the final form. |
 |
| The board, which we will insert into a shelf slot in an empty shelf unit. We inserted hooks from which the sculpture will hang, upside down. |
|





{kind=link}










{kind=link}

{kind=link}



{kind=link}